Nutnost snižovat náklady na přípravu objednávek způsobuje, že v současné době jsou čím dál, tím častěji používána řešení kompletace, která vycházejí z automatických systémů. Vyplývá to z velkých výhod systémů tohoto druhu, takových jako snížení počtu personálu, neustálá kontrola a řízení skladových zásob, možnosti vytvoření skladů vysokého skladování, nepřítomnosti překládkových zařízení pro kompletaci atd. Obyčejně je v řešeních tohoto druhu skladováno zboží střední spotřeby, které doplňuje objednávky plných palet.
V podstatě existují čtyři konfigurace používané pro realizaci automatické kompletace na paletách: vytvoření stanovišť pro kompletaci v přední zóně automatického skladu, vytvoření takových stanovišť v bočním prostranství automatického skladu, vytvoření stanovišť pro kompletaci v přilehlých zónách nebo použití speciálních kompletačních robotů. Všechny výše uvedené systémy jsou prezentovány v další části článku.
Stanoviště pro kompletaci v přední zóně automatického skladu
Jedná se o nejčastěji používané řešení v malých a středních skladech, ve kterých není kompletace nejdůležitější operací. Existují různá řešení, která je možné použít v závislosti na počtu kompletovaných objednávek. Každé z nich má jiná použití a jinou efektivitu, proto je důležitá podrobná analýza každého případu, za účelem volby té nejvhodnější konfigurace prvků. Tato fotografie ukazuje příklad oblasti kompletace v přední zóně.

Oblast kompletace v přední zóně.
Stanoviště pro kompletaci umístěná v bočním prostranství automatického skladu
Konfigurace této alternativy vychází z umístění spádových regálů na nejnižší úrovni – na úrovni podlahy – v boční části automatického skladu. Tyto regály jsou nasměrované takovým způsobem, aby jejich konec ústil do koridoru, jak je to viditelné na následující fotografii.

Stanoviště pro kompletaci umístěné v bočním prostranství automatického skladu.
V těchto spádových regálech, ve kterých je možné umístit dvě nebo tři palety v jednom kanálu, jsou skladovány palety největší spotřeby. Plné náhradní palety jsou umístěné v paletových regálech, které se nacházejí nad spádovými regály, díky čemuž je může zakladač doplňovat podle jejich vyprazdňování.
Operátor provádí kompletaci tak, že se pohybuje po celé délce boku automatického regálového skladu s paletovým vozíkem nebo s vozíkem pro kompletaci objednávek. Zbývající výrobky, které se nacházejí v jiných koridorech a jejichž spotřeba je menší, jsou kompletovány na stanovištích pro kompletaci, která jsou umístěny v přední zóně.
Tento systém kompletace v bočním prostranství skladu umožňuje použití zařízení typu pick to light, která usnadňují a zvětšují efektivitu operace přípravy objednávek.
Kompletace v přilehlých zónách
Pro výrobky s velkou spotřebou je za účelem zkrácení doby kompletace dobrým řešením umístění spádových policových regálů po obou stranách pracovního koridoru. Vykládka probíhá pomocí cyklicky se pohybujících vozíků, které přepravují zboží ke spádovým regálům.
Náhradní palety jsou skladovány v automatickém skladu se zakladačem. Tento sklad je spojen s cyklicky se pohybujícími vozíky pro kompletaci pomocí válečkových dopravníků nebo cyklicky se pohybujících vozíků, závěsných vozíků nebo automaticky řízených vozidel (AGV a LGV).
Překládkovým zařízením doporučovaným pro operátory je mobilní paletový vozík nebo vozík pro kompletaci objednávek na úrovni podlahy.
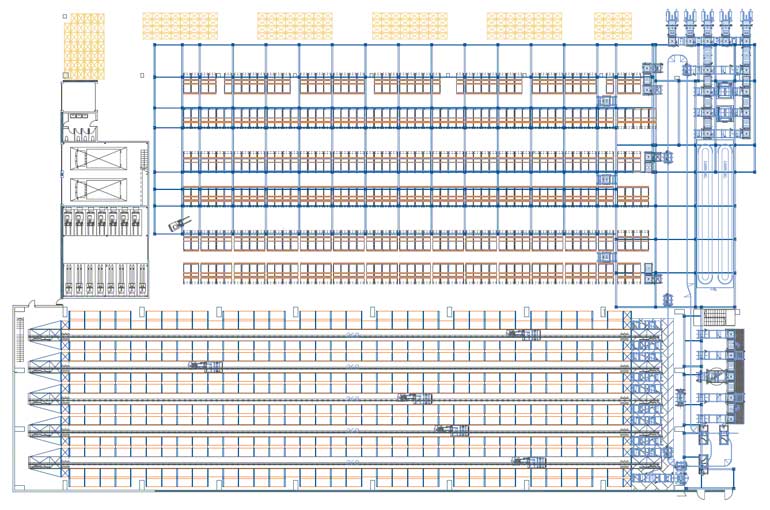
Příklad rozmístění kompletačních stanovišť v automatickém skladu.

Automatická kompletace prováděná roboty
Pro realizaci hromadné kompletace a doplnění automatických skladů je možné použít kompletační roboty, které mohou automaticky obsluhovat jednotlivé kontejnery nebo plné vrstvy kontejnerů.

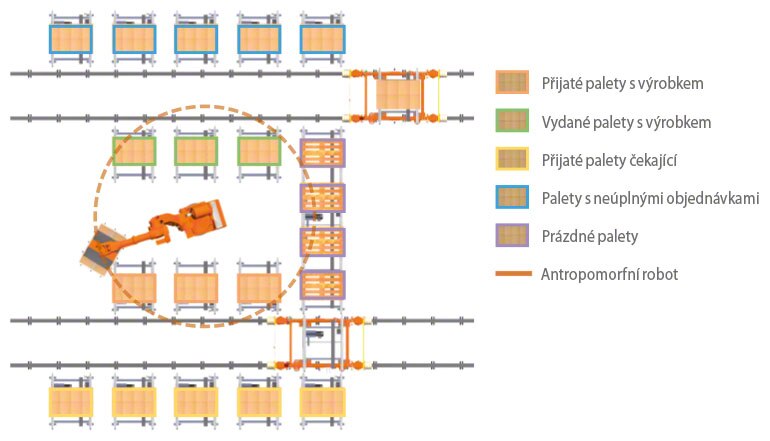
Antropomorfický robot pro obsluhu palet.
Tyto roboty mohou být trojího druhu: antropomorfické, rámové dvouosé a rámové trojosé. Použití daného druhu robota je v největší míře závislé na počtu cyklů prováděných za hodinu a také na spojení objednávek.
Antropomorfické roboty se mohou otáčet o 360 º a jsou vybavené kloubovým ramenem, které umožňuje provádění různých pohybů. Rameno zajišťuje přístup ke kontejnerům nebo vrstvám v libovolném místě, které je v jeho dosahu. Princip činnosti je podobný schématu znázorněnému na níže uvedené ilustraci, na které je viditelný systém automatizované kompletace, kterou provádí robot určený pro depaletizaci:
Dvouosé rámové roboty mají pevné manipulační rameno, které se může pohybovat pouze ve svislém směru. Vozík, ke kterému je uchyceno rameno, se pohybuje vodorovně nad rámem, díky čemuž má přístup ke každému bodu, který se nachází na stejné přímce. Může obsluhovat několik palet, které jsou obvykle seřazené ve čtyřech nebo pěti polohách, dvě palety přijímané a zbytek palet vydávaných.
Schéma činnosti je znázorněno na níže uvedené ilustraci:
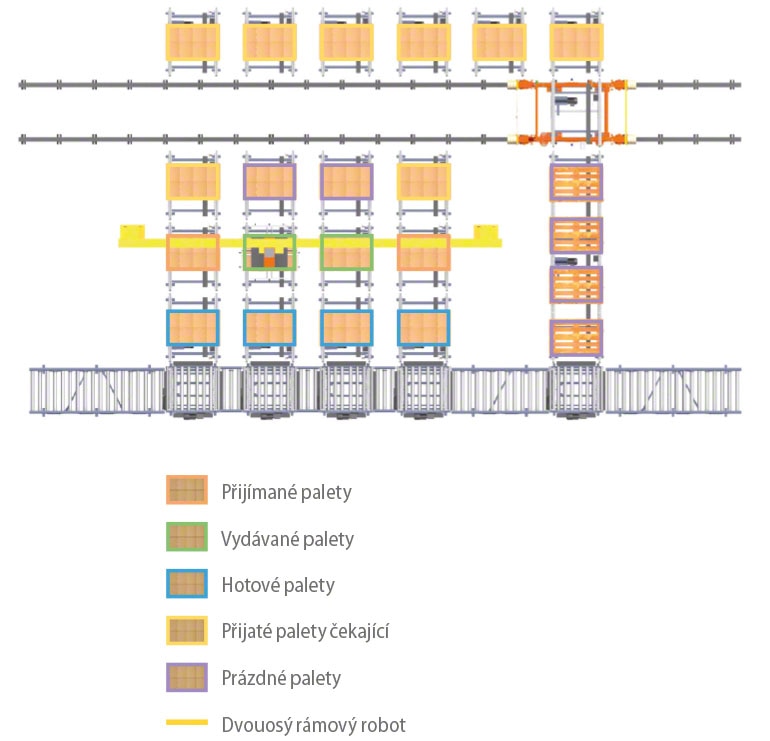

Dvouosý rámový robot.

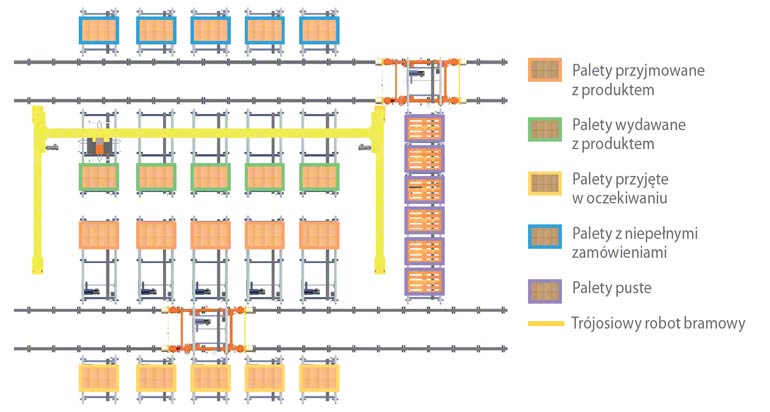
Trojosý rámový robot.
Princip činnosti trojosých rámových robotů je podobný, jako u dvouosých robotů, ale celý rám se pohybuje podél třetí osy na boční konstrukci. Takové řešení robotovi umožňuje přístup ke dvěma různým řadám palet , které jsou určeny pro vydávané nebo přijímané položky. Výsledkem je větší rozmanitost objednávek a také je možná kompletace jejich většího počtu.
Schéma činnosti je znázorněno níže: